| ����������������Ƽ������ |
||||||||||||||||||||||||
| 1.�������ΪʲôҪ�䲽��������������ܹ����� | ||||||||||||||||||||||||
| ���������Ϊһ�ֿ��ƾ���λ�Ƽ���Χ����ר�õĵ��, ������ת�����������еIJ���ǽǣ�ת���붨�ӵĻ�е�ṹ��������һ��һ�����е�, ���ص���ÿ��תһ���������ʼ�ղ��䣬�ܹ����־���ȷ��λ�á�����������ת���ٴΣ�ʼ��û�л��������ڿ��Ʒ������ɱ��������㷺Ӧ���ڸ��ֿ������ơ����������������Ҫ���������Ĺ����͵���װ�ý�������, ����Dz�������������������տ���ϵͳ�����������źţ����ղ�������Ľṹ�ص㣬˳��������壬ʵ�ֿ��ƽ�λ�ơ���ת�ٶȡ���ת�����ƶ�����״̬������״̬������ϵͳÿ��һ�������ź�, ͨ�����������ܹ��������������תһ������ǡ����������ת���������źŵ�Ƶ�ʳ����ȡ���λ���������������ء��������ֹͣ��תʱ���ܹ���������״̬���ƶ������ܹ��������ֱ���ת�أ�ͨ����Ϊɲ�����֣��������ƶ����е�ƶ�����ת�Ӵ�������״̬���ܹ����ⲿ��������������ת������������������������벽��������ͺ���ƥ�䡣����������������������� | ||||||||||||||||||||||||
| 2.ʲô����������ϸ�֣����������벽�����ʲô��ϵ�� | ||||||||||||||||||||||||
| “ϸ��”�����“�����”���Եġ�û��ϸ��״̬������ϵͳÿ��һ�����������źţ���������Ͱ���������תһ���ض��ĽǶȡ���������IJ������������һ������ǵ�ֵ����110BYG250A�͵��������ֵΪ0.9°/1.8°����ʾ�벽����ʱΪ0.9°����������ʱΪ1.8°�������Dz���������в���ǡ�ͨ������������������õ�ϸ��״̬������������ᰴ��ϸ�ֵIJ������תλ�ƽǶȣ��Ӷ�ʵ�ָ�Ϊ���ܵĶ�λ����110BYG250A���Ϊ�����б�˵���� | ||||||||||||||||||||||||
|
||||||||||||||||||||||||
| ���ÿ�����ϸ��������ָ�������ʱ������������ǹ��в����(�������ļ���ָһ�����磬������������10ϸ��״̬ʱ���䲽���ֻ�в���������в���ǵ�ʮ��֮һ���������������ڲ�ϸ�ֵ�����״̬ʱ������ϵͳÿ��һ���������壬���������ת1.8°������ϸ��������������10ϸ��״̬ʱ�����ֻת����0.18° ����ʵ��ϸ�־��Dz����������С�IJ������ת��Ҳ���dz�˵��������ơ���Ȼ����ͬ�ij��ϣ��в�ͬ�Ŀ���Ҫ������˵�����������������Ҫ��ϸ�֡���Щ��������IJ�������Ϊ3.6°��7.5°��15°��36°��180°������Ϊ�˼Ӵ�ǣ�����Ӧ����Ĺ���������ϸ�ֹ��ܣ�ֻ���������������þ�ȷ���Ʋ��������������������벽������IJ�����أ����벽�����ʵ�ʹ���״̬��ء� ����������������ϸ�ֵĹ�ϵ�ǣ���������ָ�����������ʱÿתһ���ݾ�����������������磺110BYG250A�����50���ݣ����������������Ϊ160����ô���������תһȦ�ܹ���Ҫ50×160��8000������Ӧ�����Ϊ360°÷8000��0.045°�����������������Ϊ40ϸ��״̬�������û���˵��û�б�Ҫȥ���㼸�����ģ��������������������顣�û�ֻҪ֪��������ϵͳ����������������������ϸ���������Dz�������������е������������磺��������IJ����Ϊ1.8°ʱ��ÿ����200�����壬����������ܹ���һ��������תһȦ��������������Ϊ40ϸ��״̬���������ÿ������תһȦ������������Ҫ����8000���� |
||||||||||||||||||||||||
| 3.������ϸ����ʲô�ô��� | ||||||||||||||||||||||||
| �����������������ϸ�ֹ��ܣ��ܹ�������������ĵ�Ƶ�����������������������������������������IJ�����ߣ�����������ڵ��ٹ���ʱ�������Ѿ���ֱ��������������Ƶ�����Dz�������������Ƿ�Ӧʽ������Ĺ������ԣ�ֻ�в���������ϸ�ֵİ취�����ܼ���������� ����ϸ�ַ��������ܹ���߲�����������ת�ء���������ϸ��״̬�£��ṩ����������ĵ����Ե�“������ǿ��”������ؼ��ٲ��������תʱ�ķ���綯�ơ� ��������ϸ�ֹ��ܣ������˲��������������תλ�Ʒֱ��ʡ���ˣ���������IJ���ǣ���û�б�Ҫ���ø�С��ѡ�����еij��������ǵIJ������������40ϸ�����µ������������ܹ���ɾ��ܿ����������ڲ����������ǵ�ԭ����������ϸ�����ټӴ��Ѿ�û��ʵ�����塣ͨ����ѡ��5��8��10��20ϸ�֣����ܹ���Ӧ���ֹ���Ҫ�� |
||||||||||||||||||||||||
| 4.������������з����м��ַ��������� | ||||||||||||||||||||||||
| ƽʱ���������ַ������ñ䲽���������ת���� һ���ı����ϵͳ�ķ����źţ����ߵ�ƽ��͵�ƽ�� ������������·������������������ı������˳�� �������������������һ����Ȧ��������ͷλ�ã����½����������� ���巽�����±��� |
||||||||||||||||||||||||
|
||||||||||||||||||||||||
| �� | ||||||||||||||||||||||||
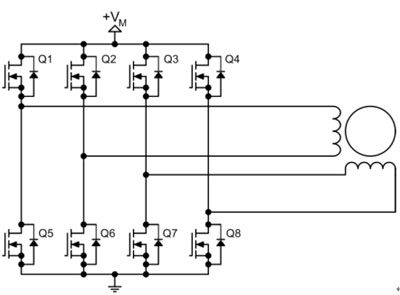
| 5�����������Ͱ˸��ߵģ����ʹ������������������ | ||||||||||||||||||||||||
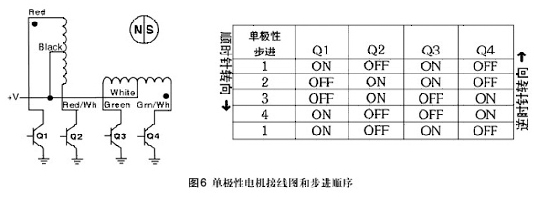
| ������ʽ���������������Ϊ�Ƕ�����ʽ���������������Ȧ�����ͷ����Ϊ����Ӧ��ͬ������������Ƶġ����ڲ����������Ȧ����ת�١�ת���������еĹ�ϵ����������ٹ����IJ����������������ͬ��ͨ�������ٲ�������ĵ��Ҫ��Сһ�㣬���ٹ���ʱҪ���һ��ĵ���������ǣ���Ҳ���Ǿ��Եġ������ʵ��Ӧ�ã�������Ȩ�������ڶ�������ء�����ͼ��ֲ����������Ȧ���鼰���ߣ�����˫������������˵�����߷����� �������ߵ����1 ��2Ϊһ�࣬�ֱ��A��/A��3��4Ϊһ�࣬�ֱ��B��/B���ο���ͼ�� �������ߵ�������ַ������ߣ� һ��1��2Ϊһ�࣬�ֱ��A��/A��5��6Ϊһ�࣬�ֱ��B��/B�� 3��4���ã��ֱ����գ���Ҫ�������� ����1��3Ϊһ�࣬����A��/A��4��6Ϊһ�࣬����ΪB��/B��2��5�ֱ����ղ��ã���Ҫ�������� �ο���ͼ�� ������ߵ���� �����ֽӷ��� �����ӷ���1��3������2��4�������ֱ��A��/A��5��7������6��8������ �ֱ��B��/B�� �����ӷ���1��4Ϊһ�࣬�ֱ��A��/A��2��3���Ӻò��ã�5��8Ϊһ�࣬�ֱ��B��/B��6��7���Ӻò��á� �ο���ͼ�� 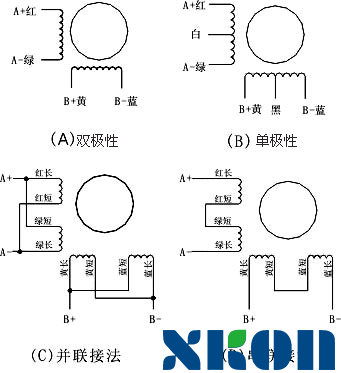 6.�������߲��������ν��������� �����������ߡ����߲�����������������������У���Ϊ�����ƣ���Ӧ������Ҫ����������Ҫѡ����������ʽ������HSM8672�����Բ������������������ͼ���������߲��������2��5����Ϊһ�ߣ�������߲��������2��3��6��7����Ϊһ�ߡ� |
||||||||||||||||||||||||
| 7.����ڵ�������ʱ������Ϊ���Ը�һ���Ƶ���Ծͻ��ת�� | ||||||||||||||||||||||||
| ��������ܸ�����Ҫ�ߵ�ѹ֧�֡���������Ĺ�����ѹ���ܹ���Ӧ�ڽϴ�Χ�ڵ�����ֻҪ�������ѹ�Ӹ�һ�㣬�Ϳ��Խ�������ǣ�Ҫ�ر�ע���������������ѹ���ܸ�����������Դ�˱�ע����ߵ�ѹ�������ջ��������� | ||||||||||||||||||||||||
| 8.����ȫ����ã�Ϊ�ο���ʱ��������ڶ������������У� �������ֻ�ܹ��������źſ������еģ��������ṩ��������ʱ���ڹ��ڶ̵�ʱ�������ϵͳ������������̫�࣬Ҳ��������Ƶ�ʹ��ߣ������²��������ת��Ҫ���������⣬������üӼ��ٵİ취������˵���ڲ��������ʱ��Ҫ�������ߵ�����Ƶ�ʣ�����ʱ������Ƶ����Ҫ���͡���������dz�˵��“�Ӽ���”������ |
||||||||||||||||||||||||
| �������ת�ٶȣ��Ǹ�������������źŵı仯���ı�ġ��������Ͻ�����������һ�����壬�����������תһ������ǣ�ϸ��ʱΪһ��ϸ�ֲ���ǣ���ʵ���ϣ���������źű仯̫�죬������������ڲ��ķ���綯�Ƶ��������ã�ת���붨��֮��Ĵŷ�Ӧ�����治�ϵ��źŵı仯�������¶�ת�Ͷ��������Բ�������ڸ�������ʱ����Ҫ��������Ƶ�����ٵķ�������ֹͣʱҲҪ�н��ٹ��̣��Ա�֤ʵ�ֲ���������ܶ�λ���ơ����ٺͼ��ٵ�ԭ����һ���ġ�����ͼ���ʵ������˵���� ���ٹ��̣����ɻ���Ƶ�ʣ����ڲ��������ֱ�������Ƶ�ʣ�������Ƶ�ʣ��ӿ��Ƶ�ʣ���ɼ������ߣ����ٹ��̷�֮��������Ƶ����ָ��������ڻ���Ƶ��������ߵ�Ƶ�ʣ���Ƶ�ʲ���̫����������ת�Ͷ������Ӽ�������һ��Ϊָ����������ָ�����ߣ���ȻҲ�ɲ���ֱ���������ߵȡ�ʹ�õ�Ƭ������PLC�����ܹ�ʵ�ּӼ��ٿ��ơ����ڲ�ͬ���ء���ͬת�٣���Ҫѡ����ʵĻ���Ƶ��������Ƶ�ʣ����ܹ��ﵽ��ѿ���Ч����ָ�����ߣ�����������У������ʱ�䳣�������ڼ�����������ڣ�����ʱָ��ѡȡ��ͨ������ɲ�������ļӼ���ʱ��Ϊ300ms���ϡ����ʹ�ù��ڶ̵ļӼ���ʱ�䣬�Ծ���������������˵������ʵ�ֲ�������ĸ�����ת�� �ܶ�س��ϣ�Ҫ���������ƽ�ȡ���С�������͡�˲�����ִ��ָ��߾��ȶ�λ������Ҫ�ڱ�д����ʱʹ�üӼ��ٷ���������Ƶ�ʵIJ�ͬʱ�䳣��������ij�������ֳ�������������У����������ͬ�Ŀ���Ч�������Ҫ����Ƴ���ı�д��Ա�������˽����Ҫ����ȷ����Ŀ�꣬������������������������ 9.��Щ���ϣ��������Ϊ�λ�Ҫ�ջ����ƣ� |