| Q11���ŷ�����������ALE01��δ����� A11�����UVW���Ƿ��ж�·�������UVW�����������Ͽ���ͨ����Ȼ����ALE01����������Ӳ�����ϡ� Q12�����֪��һ̨��ɲ���ĵ����ɲ����Ҫ�������� A12���ڼ����ֲ��11�µ������п��Բ鵽��ͬ���ʵ��ɲ�������ĵĹ��ʣ�ɲ������ʱ��ȡ� Q13��ͨ��ͨѶƵ��д�����ʱ������ֹEEPROM��д���� A13��ÿ��д����ǰ��ͨ��ͨѶд��P2-30=5��֮��д��IJ���ֻ��洢��RAM������д��EEPROM���������粻���֣������������EEPROM�������� Q14��̨���ŷ���������S7-200��ν��ߣ� A14����������ָ��Ľ���ͼ���£�̨���ŷ�DI�ź��ǿ���˫������ġ� 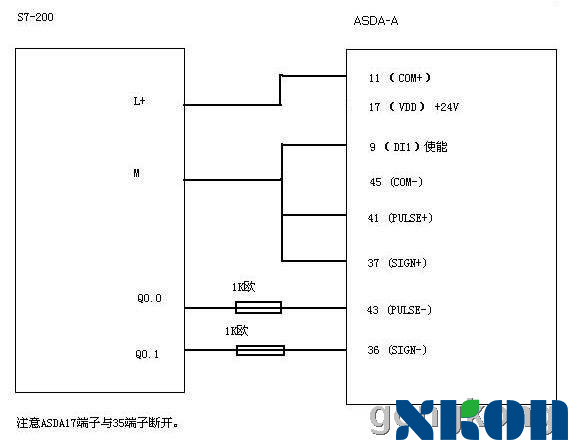 |
| Q18����ι��⸺�ع����ȣ� A18������P0-02��14��������������ϼ��Ӹ��ع����ȡ�ͨ��JOG����λ������ָ�����ŷ������������Ƶ������ת�����ĸ��ع����Ȼ������ȶ����ڲ�ͬ�����������¹����ֵ���ܲ�һ�������⸺�ع�����ʱҪ��0-2000rpm����ʱ����1S���£���ת�ٶ�200rpm���ϡ� Q19������ȷ���Ƿ���Ҫ��ӻ������裿 A19��һ���ŷ������������û������裬���ŷ�����������ALE05ʱ��Ҫ��ӻ������衣̨��Bϵ��������400W���������º�A+ϵ��������5.5KW���������������û������衣 Q20��������ӻ������裿�Ƿ���Ҫ��������� A20�����ݼ����ֲ��Ƽ�ѡ����ʵĻ������裬����������P��D�Ŷ̽�Ƭȡ�£����ⲿ�������ӵ�P��C��֮�䣬�ѵ�����ֵ/�����赽����P1-52/P1-53�� Q21��ѡ���ŷ������Сʱ��Ҫ������Щ���أ� A21�� ��������Ť�� < ����Ť�� ����ʱŤ�� < ������Ť�� ���ع��� < 3�����ת�ӹ��� ���������ٶ� < ����ת�� Q22��һ��ֱ��100mm����20kg��Բ������������Ϊ������תʱ��ת������Ϊ���٣�����һ���ŷ��������1��10�ļ��ٻ������ӵ����Բ���壬��ô���㵽�ŷ�������ϵ�ת������Ϊ���٣� A22��Բ����ת������J=1/2*M*R2=1/2*20*25=250kg.cm2 �������ٱ�֮�����㵽������ϵ�ת���������С���ٱȵ�ƽ���������㵽������ϵ�ת������J2=250/100=2.5kg.cm2 Q23���ŷ����ͨ������˿�˴���100kg�ĸ��أ�����˿������20kg/ֱ��20mm/����10mm������˿��Ϊ��ֱ��װ��������Ħ���������ŷ���������������������Ҫ�������Ť�أ� A23���ŷ������ҪŤ��T=M*g*PB/2π=100*9.8*0.01/6.28=1.56N.m M-�������� g-�������ٶ� PB-����˿���ݾ� Q24���ŷ��������������һ��ͣ���������ػζ���ʲôԭ�� A24�����ع���̫��ʹ���������������Ƶ����С��������������¼������档�����ȵ����������������ʵ�ʹ����ֵ�� Q25��PLC��������ŷ������Ϊʲô��ת�� A25����������µ����ת��ԭ���кܶ࣬��Ҫһ��һ���Ų�ԭ������Ҫȷ�ϵ���ͨ���ŷ�������JOG����Ƿ�ᶯ����Ȼ����ȷ���ŷ��Ĺ���ģʽ/��������ָ����ʽ/���ߡ� Q26���ֶ�JOGʱ���Ϊʲô��ת�� A26�����������������ͨ��������JOGʱ�����ת�� �ŷ�û��servo on����ķ���������ת���������ȷ�ϣ� ������������UVW������δ���ӣ� ������������UVW�������������Ӵ�����06������ Q27��PLC��������ŷ������ת����100rpm����ʱת����Ƶ�ʳ����ȣ���������Ƶ������ʱ���ת��ȴ�½��ˣ�����ʲôԭ�� A27��һ��PLC���������Ƶ��Ϊ10K�����ŷ�û������ӳ��ֱȵ������10000��pulse���תһȦ��10K��ָ��������ת��Ϊ60rpm�����û��ע�PLC�������Ƶ�ʵ����ƣ���̷�����Ƶ�ʵ�����Ϳ��ܵ���PLCʵ����������쳣�� Q28���ŷ��ڿ�������ʱ�����������ڶϵ�ʱ������Ҳû�����壬Ϊʲô�ŷ�����ᶯһ�£� A28���ϵ�˲������и�Ƶ�Ӳ�ͨ�������߽����ŷ�������������ŷ���Ȼ��servo on��״̬�ͻ���Ӳ���������ָ�����ŷ�������ж���������ͨ�����ò���P1-00.Y��һλ(bit)�����˸�Ƶ�Ӳ���������һЩ��ģ����ָ������ŷ���ϵͳ��Ҳ������ͬ������������д�����ϵͳ�������servo onʱ����ϵͳ�ϵ��ŷ�Ҳ���ж��������Һܾ��ҡ� Q29��������滻һ̨����ת��Ϊ10N.m�IJ������Ӧ��ѡ���Ť�ص��ŷ������ A29������ת����ָ�������ͨ�絫û��ת��ʱ��������סת�ӵ����ء�ͨ����������ڵ���ʱ�����ؽӽ�����ת�أ��������������������ٶȵ����������˥������Ϊ�������û�й���������һ������ѡһ��Ť���Dz������Ť������֮һ���ŷ�������ɡ� Q30��������滻һ̨��ͨ��1KW�ļ��첽���Ӧ��ѡ�������ŷ������ A30����ͨ�첽������ŷ����֮��û�мĶ�Ӧ��ϵ�������Ͽ���˵���߿���Ҫ����ȫ��һ�������������ֻ��ͨ�����㸺�صĹ���/Ť��/ת�ٵȷ�ʽ��ѡ���ŷ������ Q31���ŷ������ת����������λ���ͣ������Ϊʲô��ʱ������������ȴ���ᷴת������ A31���ŷ������ת����������λ���ͣ��������������ʾ����ALE14�������ʱ��������û��ֹͣ�ŷ��������ᷢ����������ALE09����ΪALE14��ǰ����ALE09������ʾ�����������ٷ����������ŷ��Ͳ��ᶯ���ˡ�ASDA-ABϵ���ŷ��ɽ�����P2-65��bit13��ON������������λ��Ͳ����ٽ����������壬������λ��Ͳ����ٽ��շ������塣ASDA-Bϵ���ŷ�û�������Ĺ��ܡ� Q32��������ʹ��ʱ��Ϊ��ͣƵ�ʺܸߵ��µ���¶Ⱥܸߣ���������ʹ�õ���Ƿ���� A32���ŷ�����������¶ȴﵽ85���϶�����ʱ�ͻ����ŷ����ת���¶ȴﵽ130���϶����Ͼͻ�����˴�������Ϊ�ŷ����������²�������������¶�85���϶�ʱ����ڲ��¶�130�ȡ����ŷ������ͣƵ���ij��ϣ����ܳ����ŷ�����¶Ⱥܸߵ��������ʱ��Ҫ���ⲿ��ȡǿ����ȴ�Ĵ�ʩ�� Q33���ŷ�������ģ��������Ľ������Ƕ��٣� A33��-11v~11vΪ12bit��-0.6875v~0.6875vΪ11bit�� Q34��̨���ŷ�ʹ�õĻ����¶�������������20���϶��Ƿ���Թ����� A34��̨���ŷ�������ʹ�û����¶�0~50���϶ȣ��ŷ����ʹ�û����¶�0~40���϶ȡ���������¶ȸ��������Χ��Ҫ��ǿ����������֤ɢ�ȡ�����20���϶�ʱ���Dz���֤�ŷ���������������Ҫ�û��Լ�ȥ���顣 Q35���ŷ����������ͣ����ʱ��ζ����о����������ͣ���������������ɲ���ĵ���Dz��ǻ��һЩ�� A35���ŷ�����Դ���ɲ�����������õ�����ٵģ��������ڶϵ������·�ֹ�����������Ӱ��ת�������紹ֱ��װ�ij��ϡ� Q36��Q��̨���ŷ���α������ģʽ�� A36��������P1-01�趨Ϊ��������֮ģʽ��(�ο��±�) ,�趨�ò�����,�轫�ŷ������������ϵ�� ,�����Ŀ���֮ģʽ�� Pt��λ�ÿ���ģʽ(�����ɶ�������) Pr��λ�ÿ���ģʽ(�������ڲ�����������) S���ٶȿ���ģʽ(����/�ڲ������� T��Ť�ؿ���ģʽ(����/�ڲ�������) Sz�����ٶ�/�ڲ��ٶȻ��������� Tz����Ť��/�ڲ�Ť�ػ��������� Q37��ALE02����ѹ/ALE03�͵�ѹ��������ʱ��δ����� A37������ʹ�����ñ����������ѹ�Ƿ���������Χ�ڣ��ٴ���ͨ�����������ŷ�����ʾ��������“����·��ѹ”������ֱ��ĸ�ߵ�ѹ����ѹ����Ӧ�������뽻����ѹ��1.414������������Ӧ�ò�����̫���ƫ����ƫ��ܴ��践������У��ALE02/ALE03��������“����·��ѹ”���жϵġ� Q38���ڸ�������ʱ��̨����;�к����Ե�һ�ۣ��۲췢������;��ALE03��������������һ������ʧ�ˣ���ν��������⣿ A38���ڸ�������ʱ�����ĺܴ�������ĸ�ߵ�ѹ���½�����������ѹƫ�ʹ�ʱ�ͻ����ALE03��������������ʱ�ŷ�����ֹͣ��ĸ�ߵ�ѹ�ָ������������Զ���ʧ���ŷ���������У���˿������������Ե�һ�ۡ�������������ʹ�õ����Դ����ʱ����������·ʹ�������Դ���硣����P2-65 bit12��ON��ʹALE03��������ʱ��ĸ�ߵ�ѹ�ָ��������Զ���ʧ�� Q39��PLCͨ������+����ķ�ʽ�����ŷ�ʱ�����ʼ��ֻ�ܳ�һ������ת����ʲôԭ�� A39���ٲ���������ʽ���ô�����ΪAB�������CW/CCW����ͻ��������������ڽ��ߴ�����������û���յ������źţ������������ܷ����źŵĹ����ջ��������·���������ѹ��5V�������С�İ�12V��24V�����źŽӽ�������Ϊ�����źŻ����dz�ON���ԱȽ�������Ļ�·�����ջ��� Q40������������̫�������е����ʱ��β��ҹ���Ƶ�ʣ� A40��ʹ���ŷ�����ʾ�������ܼ���“�������”������ƽ�������ʣ��������������ɼ��ӵ�����ͼ���Ե����������й�ѡ“��ʾƵ����Ѷ��FFT��”���ٿ�ѡ��Ҫ������������������ĵط����ǹ���㡣  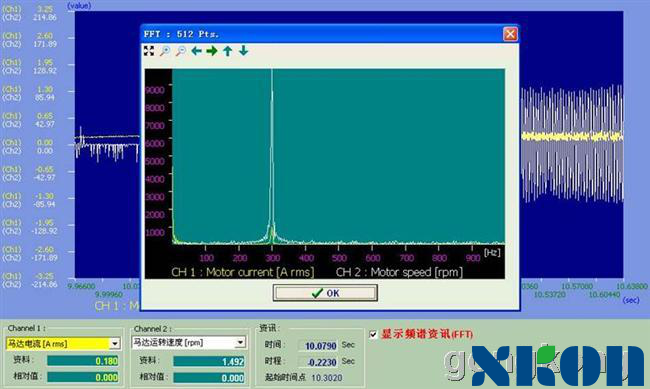 |
|||||
|
|||||
| �ظ����þٱ� | |||||
| ī֮�� | |||
|
|||
|
||